自然界中,鱼类依靠侧线系统感知水流变化,在暗流涌动的水下灵活导航、躲避障碍。受此启发,中国科学院自动化研究所智能机器人系统研究团队创新研发了基于自主视觉的仿生侧线传感器FlowSight,赋予水下机器人精准的“水流感知智慧”,为复杂水域的自主导航与环境监测任务开辟了新路径。
这种仿生侧线传感器利用一根仿鱼侧线神经丘的柔性硅胶触须进行水流传感。当水流冲击触须时,其形变信息被内置高清摄像头实时捕捉为图像序列,并利用深度学习模型从图像中解析水流速度与方向,实现了单点、无辅助设备的水流高效矢量感知。水流速度测量相对误差为3.05%,水流方向测量相对误差为0.98%。同时,研究团队将这种传感器集成于仿生水下机器人上,并成功实现基于水流感知的闭环运动控制实验。水下机器人可像真实鱼类一样逆流巡游、动态调姿,为水下勘探与生态监测提供了全新方案。
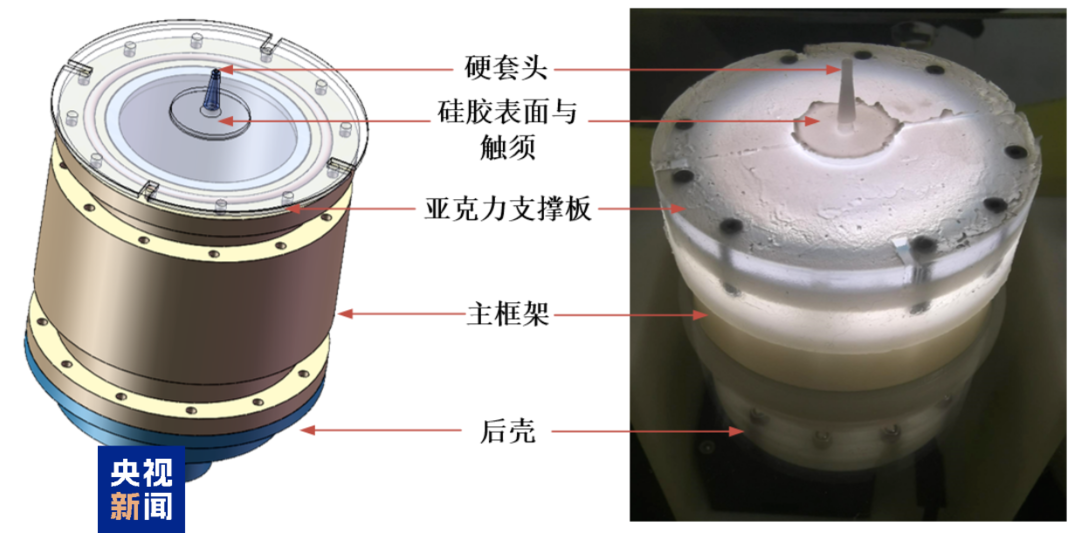
△FlowSight仿生侧线传感器三维模型与实物图
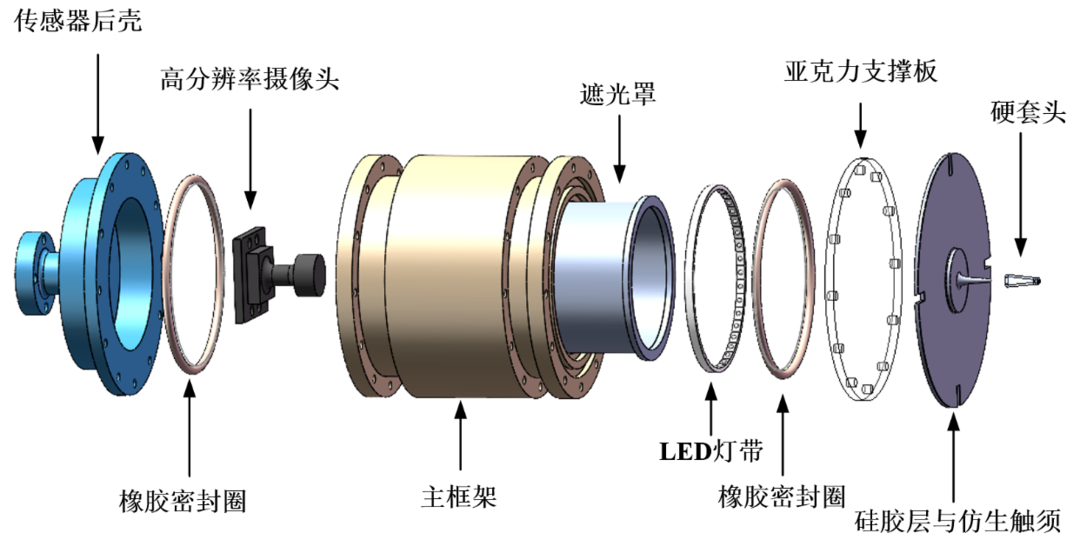
△FlowSight仿生侧线传感器爆炸视图
来源:央视新闻客户端
编辑:冯淑杰 王洁钰 李丽雪
一审:姜健 李敬友
二审:孙瑞永
三审:王桂林
留个言再走呗...